Dip Bot
I’ve had this project in the pipe for some time and I finally started to converge enough to write some code and get some experimenting done.
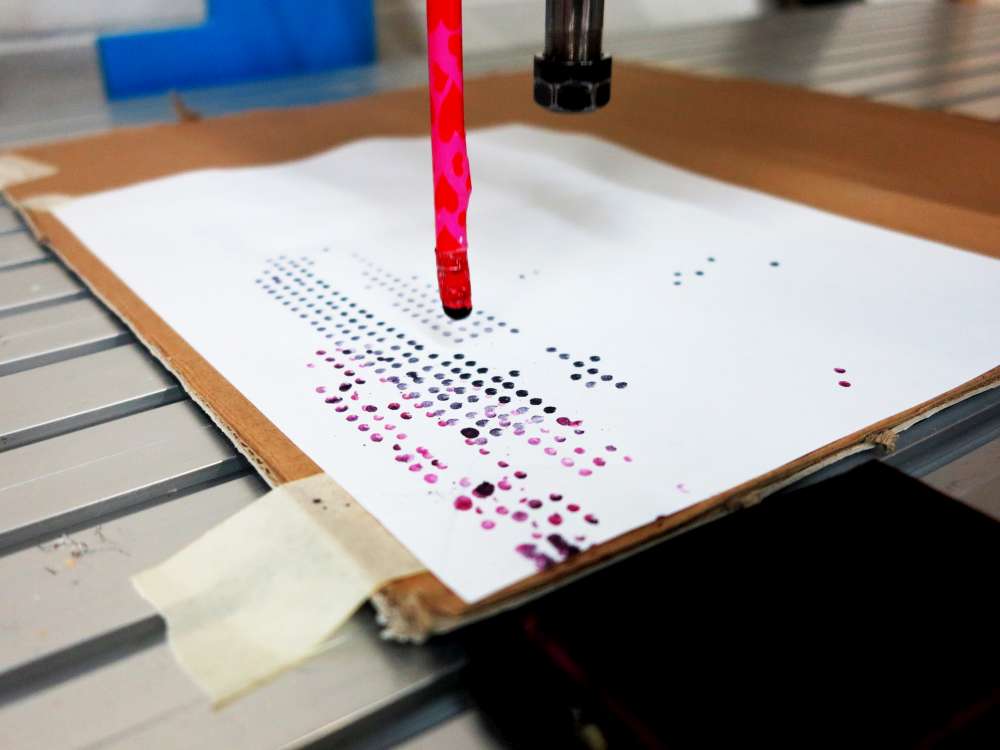
I decided on an architecture that leverages a lot of prior art. For instance I wrote processing.org sketch that reads a JPG then makes up a tool path in g-code. That way I can start testing my algorithms for painting right away using existing CNC machines. Also it will easier to make the physical machine since it could use grbl (which is an arduino g-code interpreter).
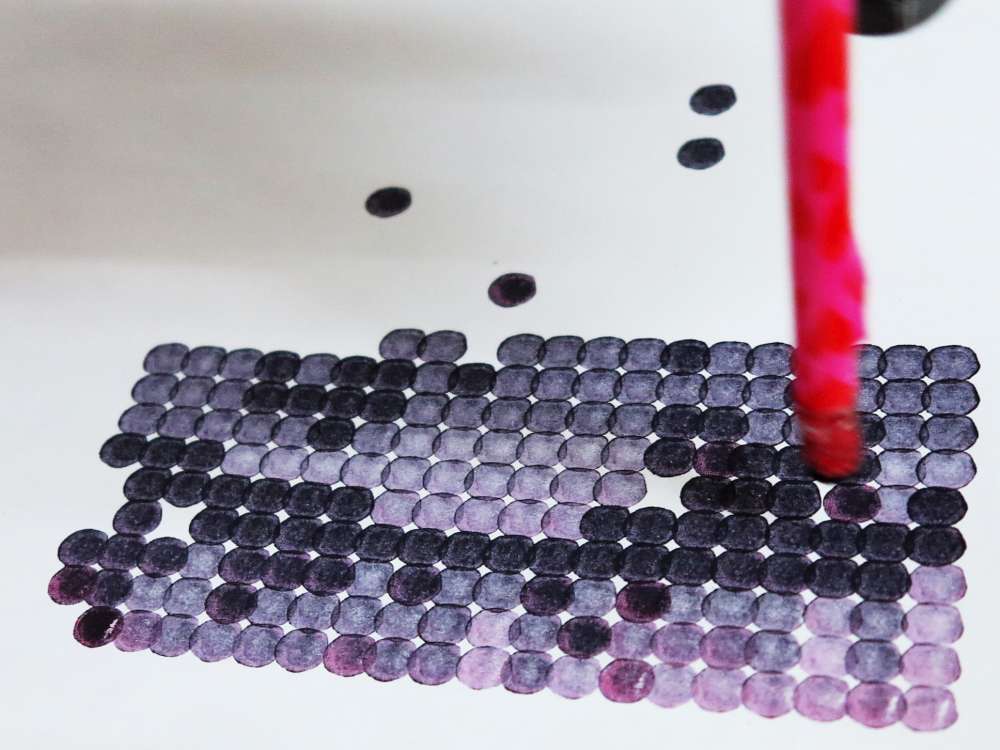
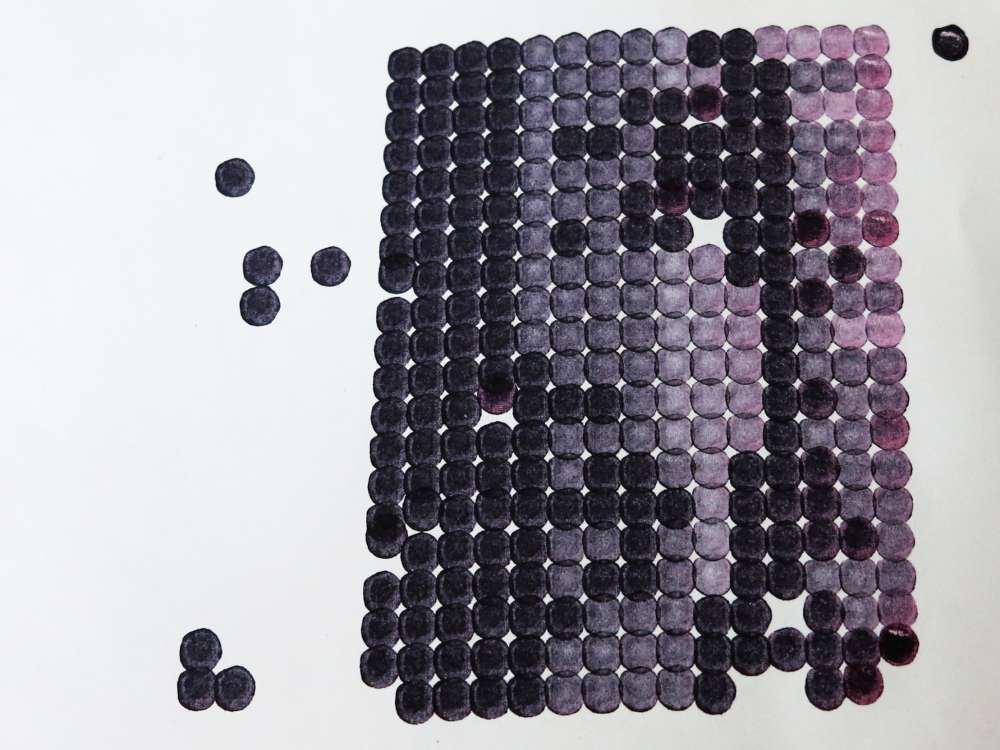
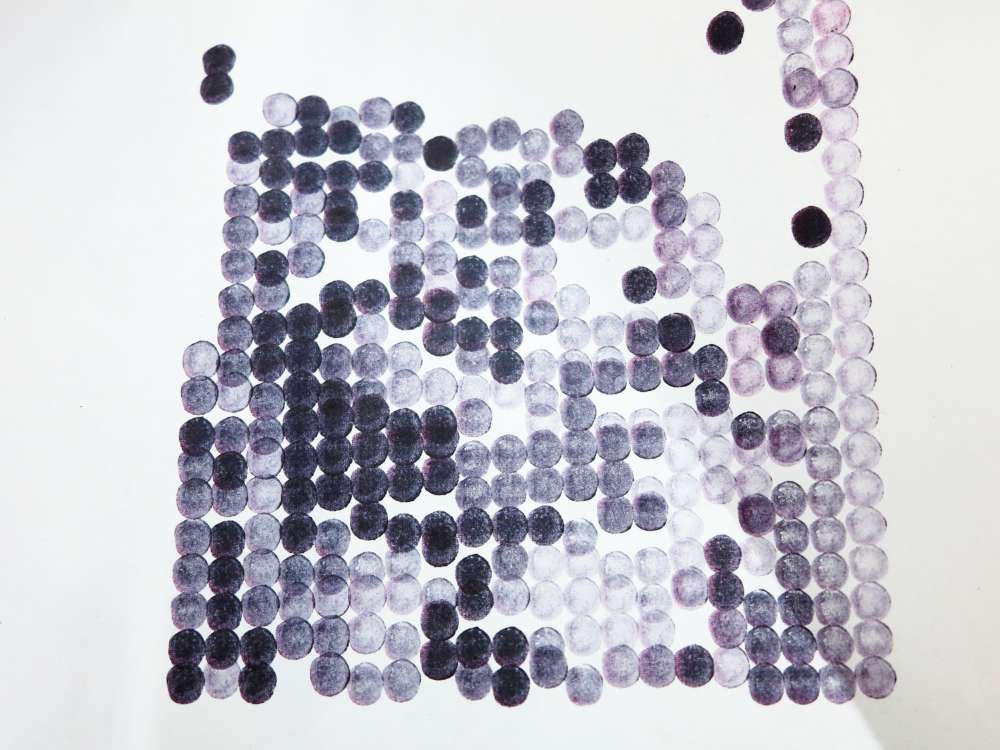
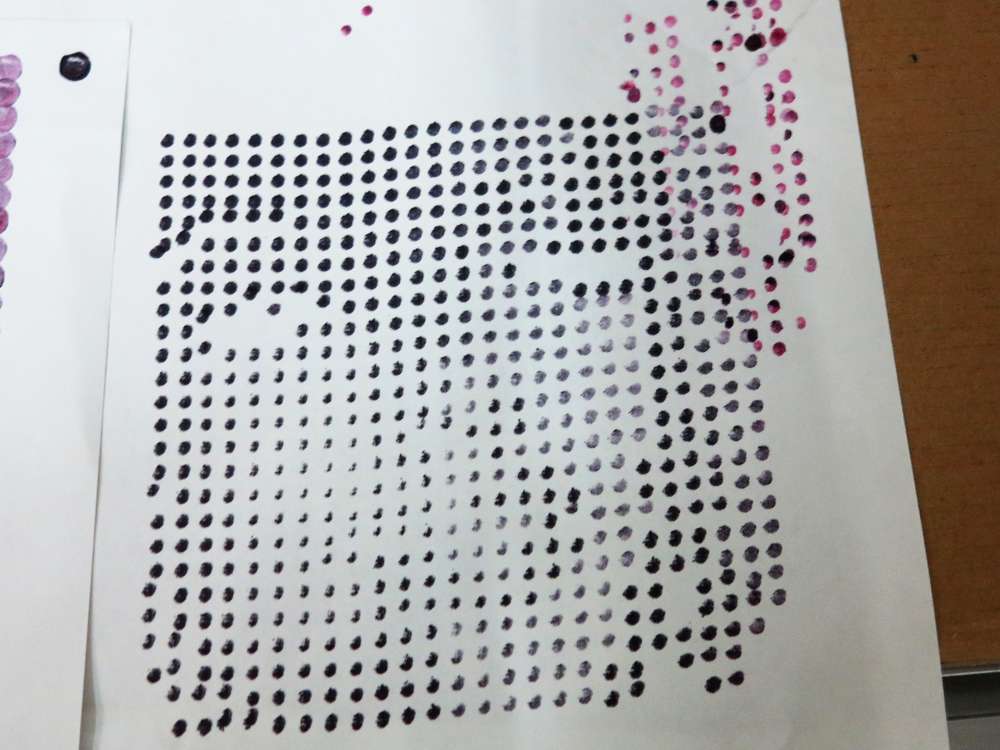
In this experiment I’m stamping with at stamp pad. The more you stamp the lighter the ink. I divided the image into four grades but I need to play with the algorithm more.

Related
Published May 21, 2016 5:33 pm.