Line Follower Robot
 There’s a bit of buzz over at Ottawa Robotics Enthusiasts about having a contest! There are two events. Line follower and maze solver. The dates being looked at are March 9th, 14th or 15th.
There’s a bit of buzz over at Ottawa Robotics Enthusiasts about having a contest! There are two events. Line follower and maze solver. The dates being looked at are March 9th, 14th or 15th.
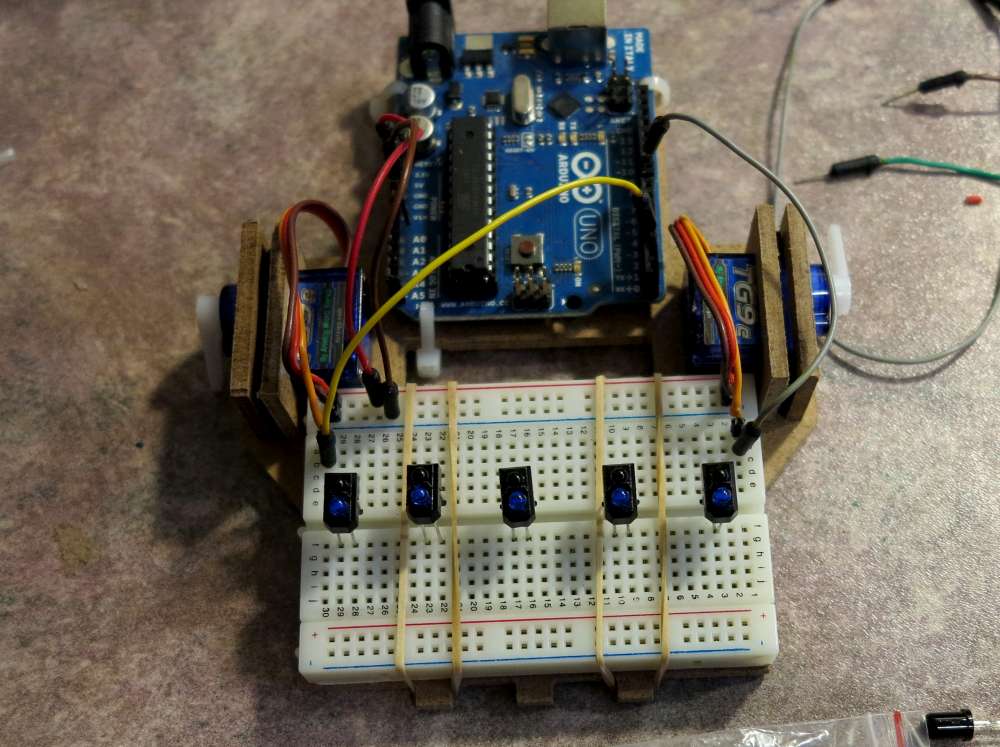
I am starting to think about an entry in the line follower. I know Rollybot isn’t the most suitable platform but I’m sure I can learn something if I use it as a starting point. I think the trick will be coming up with a sensor package to get the data needed to solve the line.
I put one together to fool around with. I want to get this thing to drive around the room avoiding collisions first. I figure that’s an easier problem to work on. I added the Sharp IR sensor. I’ve not got it working yet, it always things there’s an object in front. I’ll fiddle more in the morning.
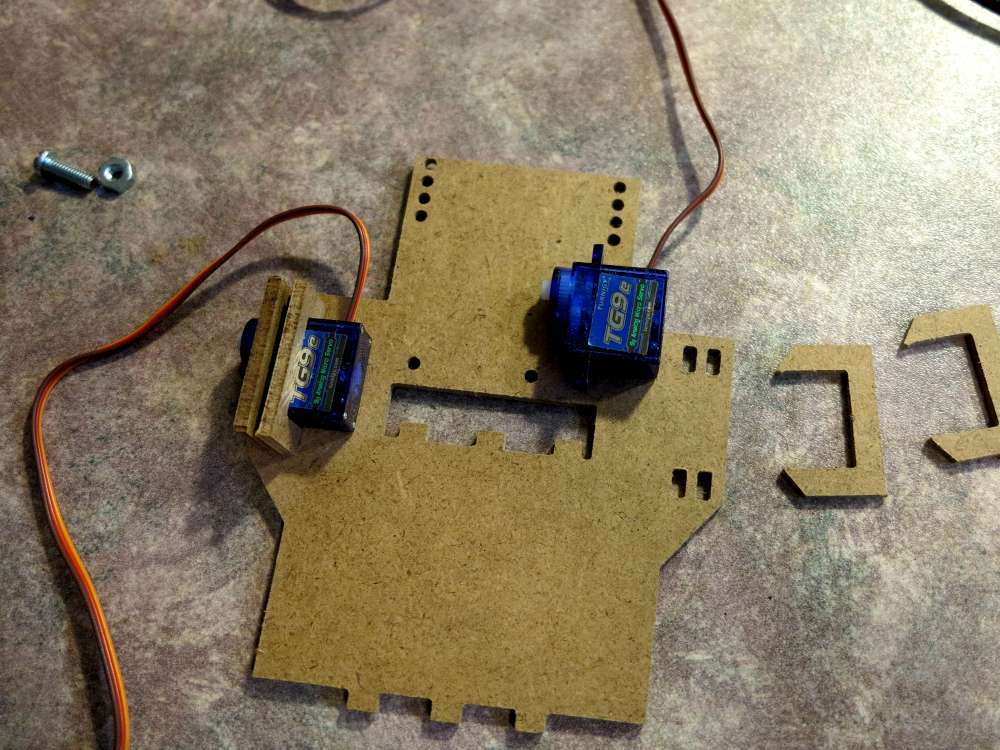
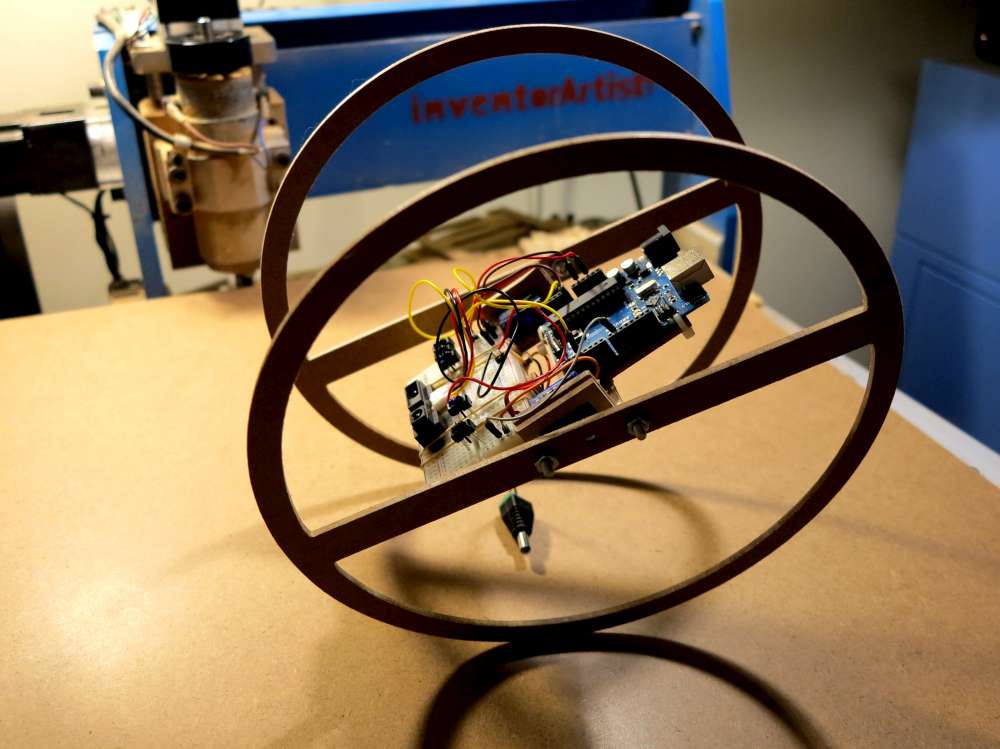
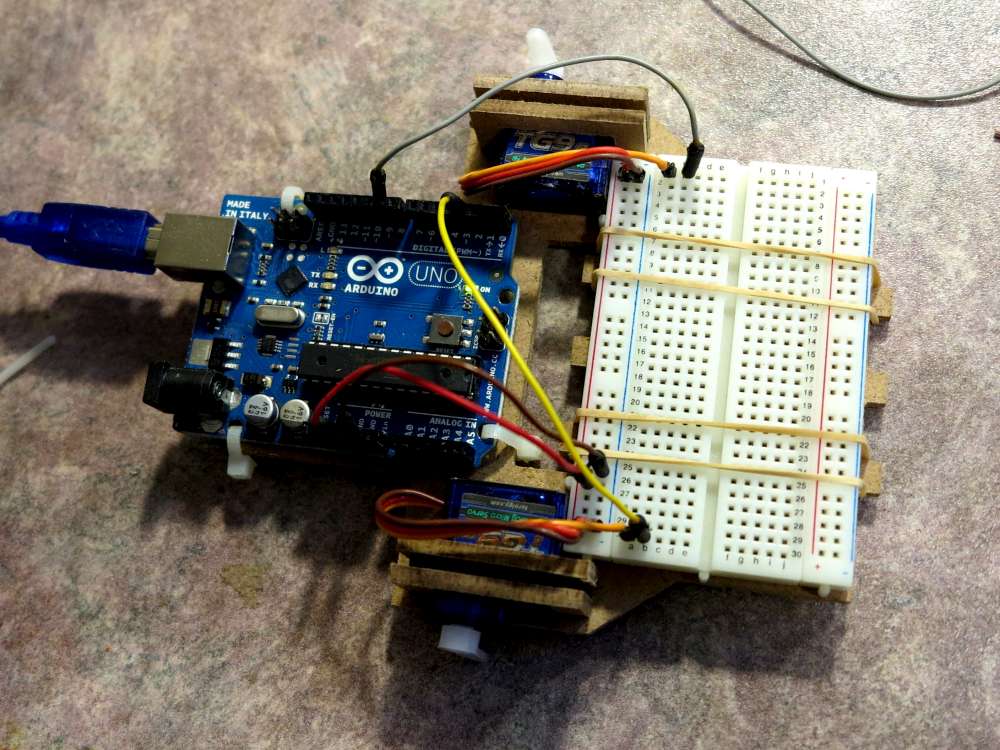
There is this slight problem with the Rollybot. It’s been oversimplified and uses hacked servos as drives. They don’t have symmetrical characteristics and there is no feedback.
The other thing is that the guys over at ORE tell me there is an interest in having the sensors far away from the drive axle. There is a simulator that verifies this to some extent. If this is the case I think it will be a matter of putting the senors on a boom.
Also the rollybot has a lot of sway. Perhaps if the sensor boom contacts the ground that will help.
Here’s a recent note from Aaron:
Alright, lets get serious in that case.
Here is my proposal : we will run the Line Follower, Line Racing and
Line Maze competitions, following the same rules as the 2011 games:
Line Follower :
http://wiki.ottawarobotics.org/index.php?title=Line_Follower_Rules
Line Racing :
http://wiki.ottawarobotics.org/index.php?title=Line_Follower_Race_Rules
Line Maze :
http://wiki.ottawarobotics.org/index.php?title=Line_Maze_Rules
Now, in the 2011 games I went a little crazy with the line follower
maze… the level 4 maze was absolutely madness and essentially created
to cause devastation. Instead of being insane, I think this time we
should simply run the CNRG 2010 courses as given on the rules page
above. The 4th level is still challenging and we can ramp up the
difficulty next time.
We’ll keep a single division for simplicity instead of having a
beginner/advanced separation. Its been a while since we’ve run the line
followers, so I think we can assume we are all beginners again!
For the line race, I still like the idea of having to stop within the
finish area. We had some issues with some of the robots not being able
to detect that last time, not because they weren’t trying to detect but
instead because there was something strange with the course that we
never completely sorted out. Instead of disqualifying robots this time,
we’ll leave it up to everyones discretion… If the majority of robots
have trouble, we’ll drop that requirement on competition day and turn it
into a modifier instead (ie- time = time * 1.1 or something for missing
the start/stop area).
For the maze competition, I’d decrease the time limit to 2 minutes (from
5) as it took incredibly long to run all the robots last time.
Aaron