Another Painting Robot
I’ve got parts on order for a 24″ x 24″ painting robot.
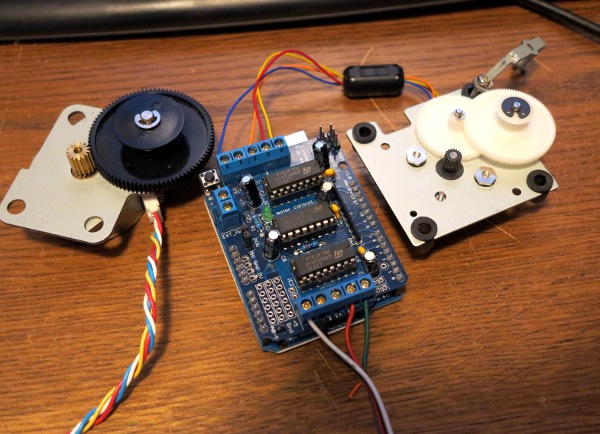
Today I decided to make a smaller painting robot out of some found junk since I’m still waiting for parts. I went through my parts box and found two stepper motors with timing pulleys, two timing belts and four rails with linear bearings from some some scanners I pulled apart a while back. That’s enough stuff to make a gantry. So I got all excited and got out an Arduino and motor controller to get the steppers running.
I installed Arduino IDE on a Linux machine, then plugged the Arduino into the USB. I was surprised it worked so easily in Linux as I was able to run the blink test right away. Next I got out one of my stepper test programs from when I made some drawing robots. I forgot the stepper driver so of course it didn’t work. I read up on the latest version of Arduino and learned that you could put drivers in your sketch directory instead of the application directory. So I did that. The driver error went away but I started to get an error that the “delay” function wasn’t defined. Nuts, that’s native Arduino stuff. I poked around and learned that with the later versions of Arduino you have to modify some libraries because the new Arduino needs different includes. After getting that worked out I was able to run the steppers. I used a 12V power supply and noticed everything was getting pretty hot. I found a 9V and repeated the stress test. The temperature seemed more normal but I didn’t get a good test since the 9V supply fried. I’ll try and stress test it with 9V on my lab supply on the weekend.
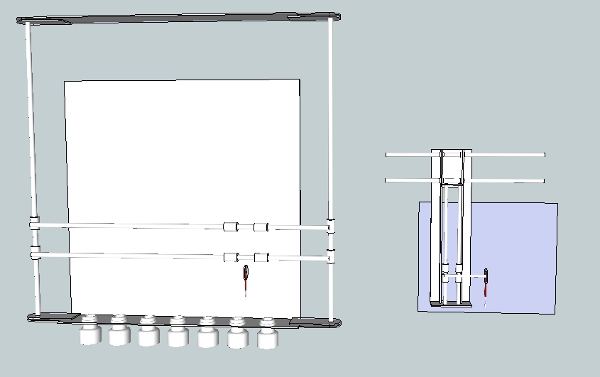
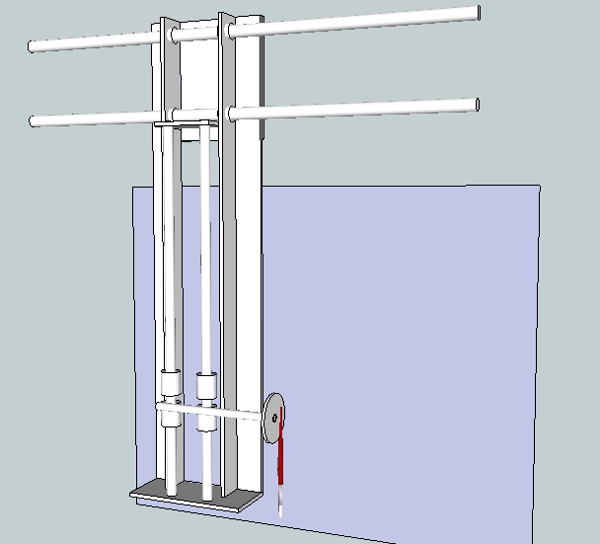
After spending a couple of hours getting the steppers going, I realized that I needed another belt so one of the axes could have two belts. So much for found objects. I only had two belts. I decided to try an unorthodox gantry and came up with the diagrams below. I’ll sleep on it to see if I think this is worth it. The gantry would need to be pretty rigid and I’m not sure if I’m in the mood for that.
One one hand the thing looks more like an arm and less like a gantry. On the down side, I probably can’t make it out of hardboard since the gantry needs to be fairly rigid (I think).
What do you think?