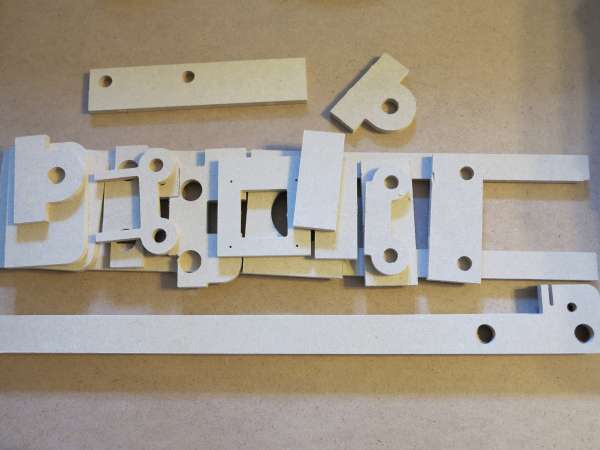
Little Dipper Mechanical
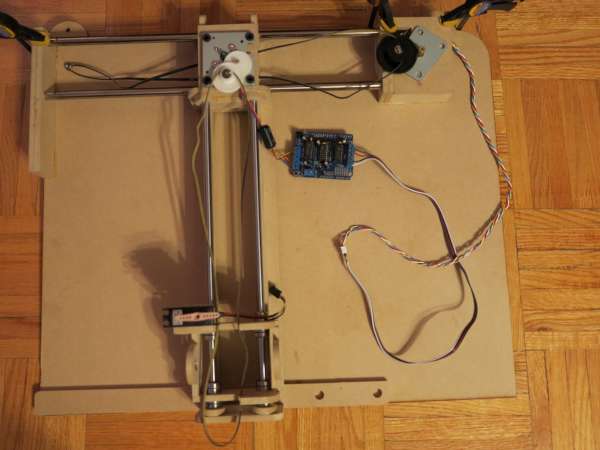
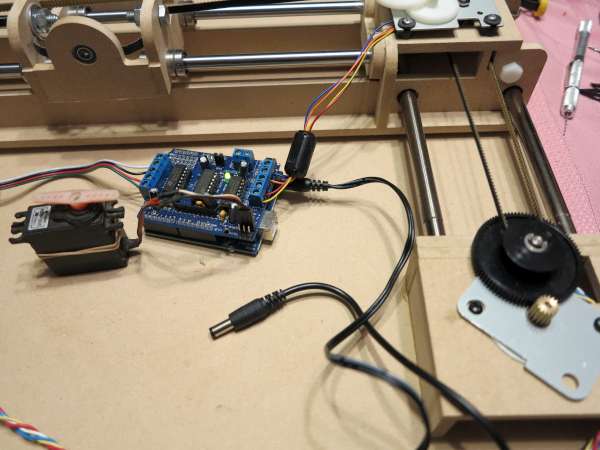
I’ve got most of the mechanical together for the Little Dipper painting robot.
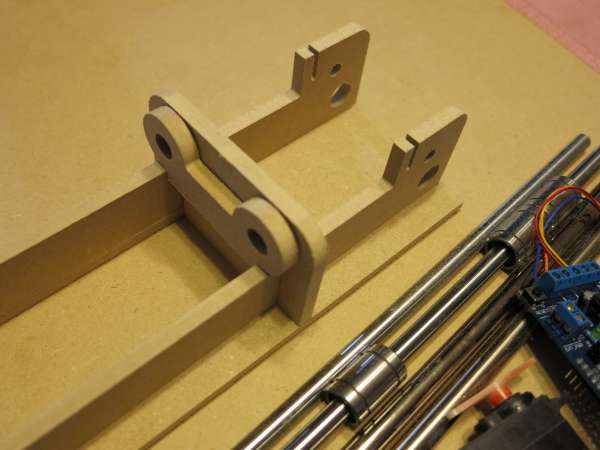
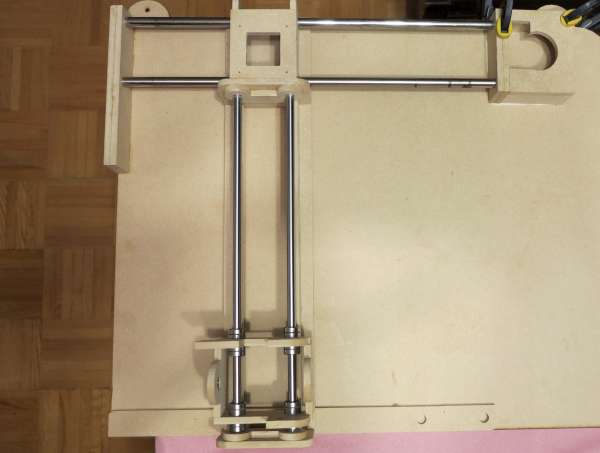
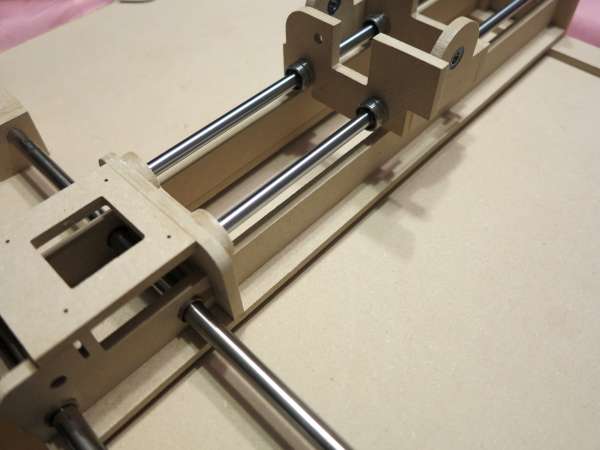
The machine has good rigidity and is big enough for an 8.5×11″ sheet of paper in landscape. There is about 1/8″ clearance between the arm and the painting surface. I hope that’s enough.
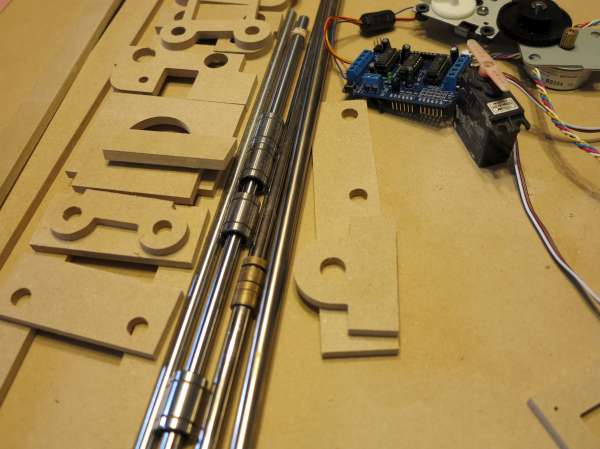
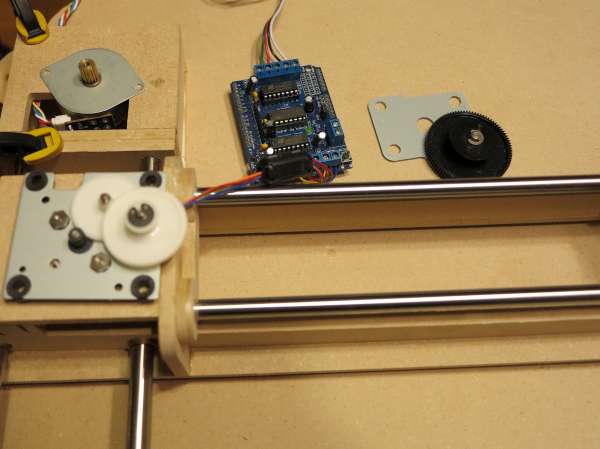
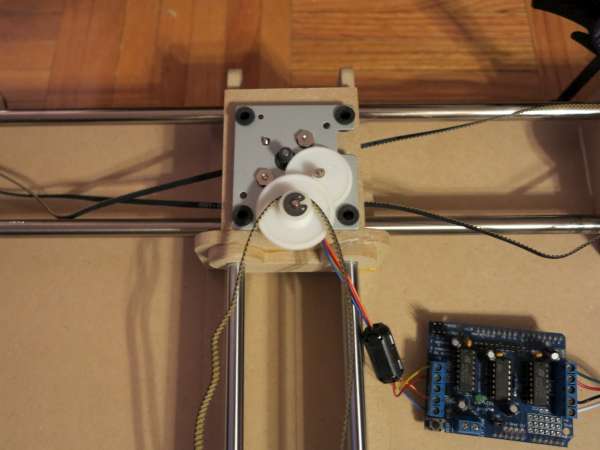
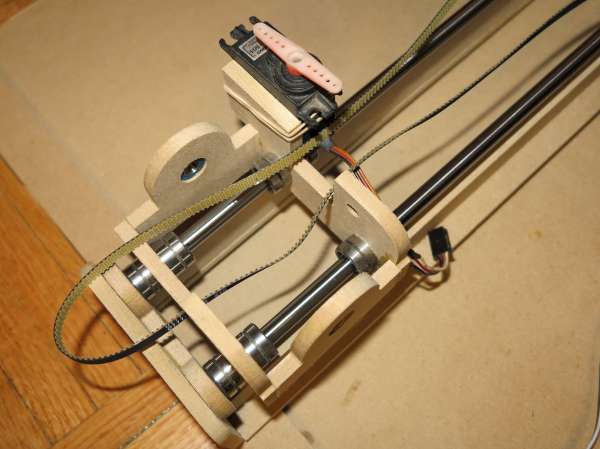
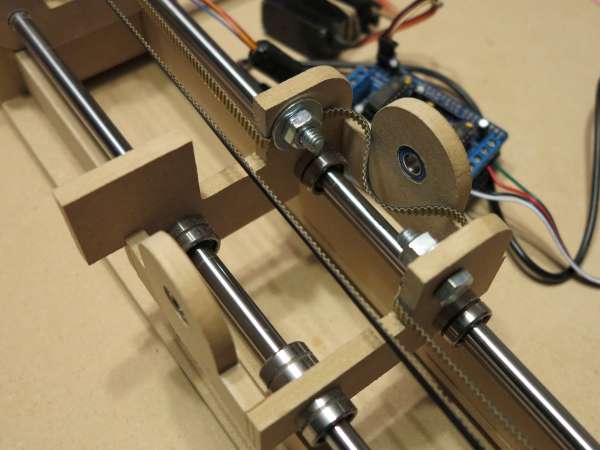
The Y-Axis works great. It is a geared stepper from an old scanner and some nice 8mm rails and linear bearings.
The X-Axis rails and bearings are from old scanners. They are a little sticky and the X-Axis motor (also a geared stepper from a scanner) doesn’t have enough torque.
I just ordered some 8mm rails and bearings. The scanner rails I have are 15.25″ and the rails I ordered are 16″ so I can either slice a bit off or increase the throw of the machine a bit. That will take a week or so, so I guess this project has to sit on the shelf for a week or so.
Changing the rails and bearings will be an ugly operation. I may just sacrifice a piece of hardboard and just assemble a new machine around the new bearings.
Lesson learned: Don’t keep junk thinking you’ll use it. You’ll spend more time buying the right stuff and redoing things.





I changed the bearings and it works! http://inventorartist.com/little-dipper-painting-machine/