Interference Rooster
I make a rooster each year for the Atomic Rooster Cock Show.
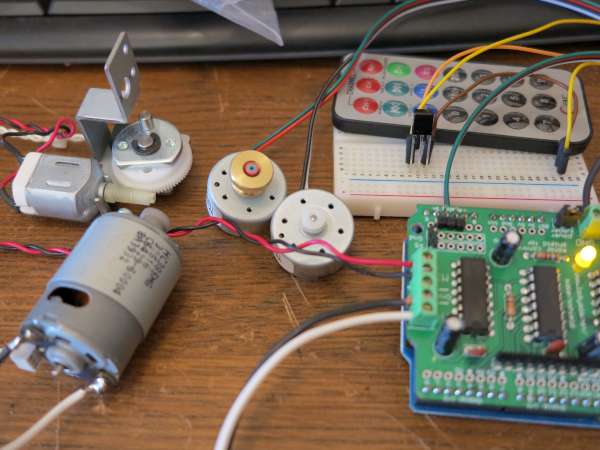
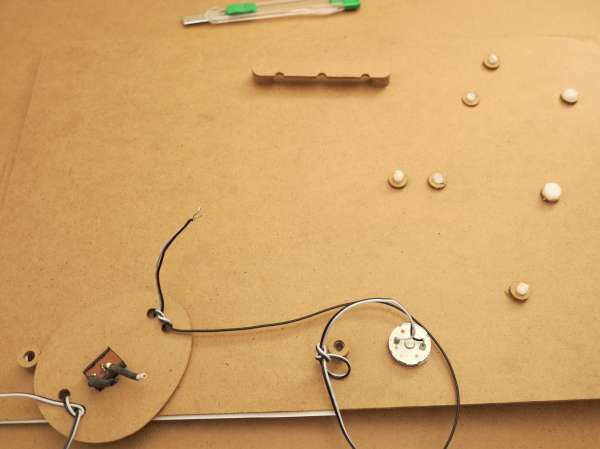
This started off as a remote control project but I decided to just go with a switch.
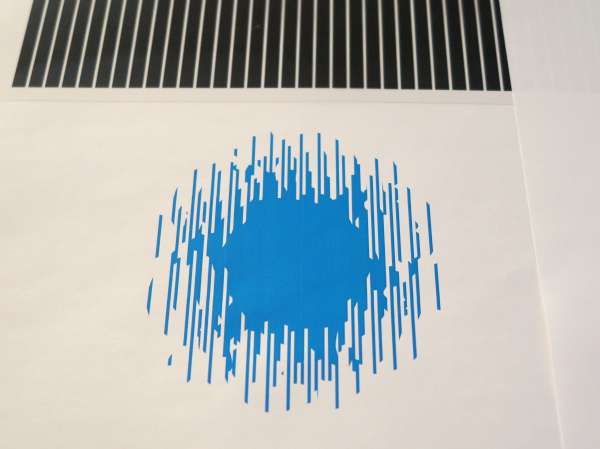
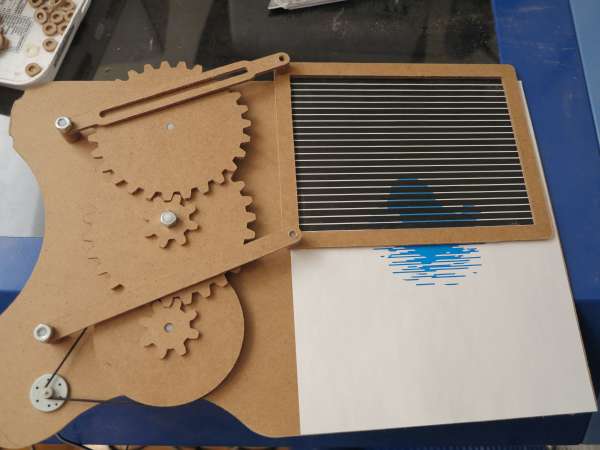
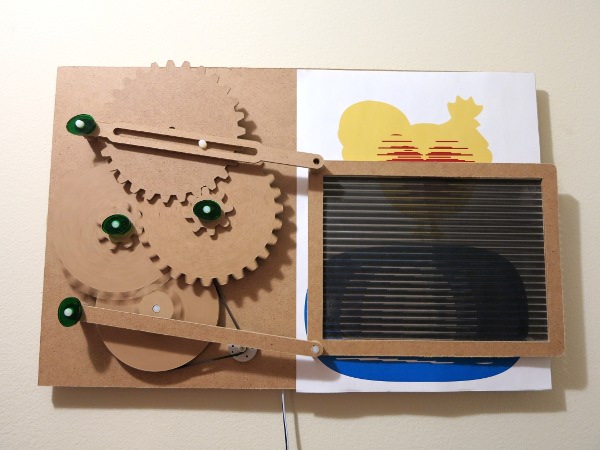
I designed some moire interference patterns and then mounted them on a motor driven system.
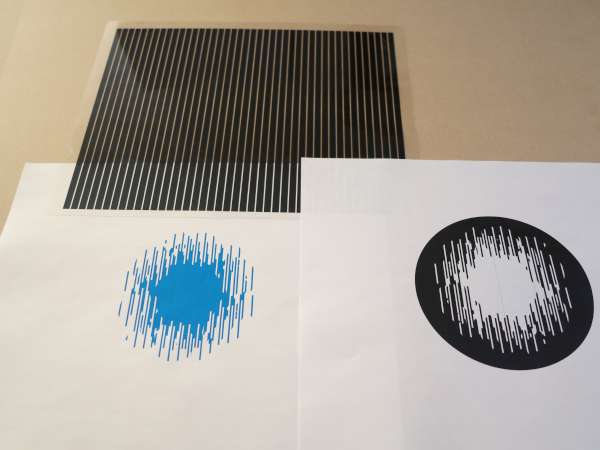

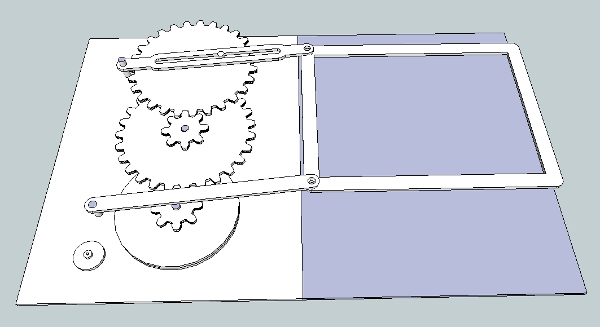 I wanted to make a device you could hang on the wall that would move the mask smoothly. I figure something like this would work (right). I’m a little concerned about static since the mask I made seems to really stick to the paper when left for a while.
I wanted to make a device you could hang on the wall that would move the mask smoothly. I figure something like this would work (right). I’m a little concerned about static since the mask I made seems to really stick to the paper when left for a while.
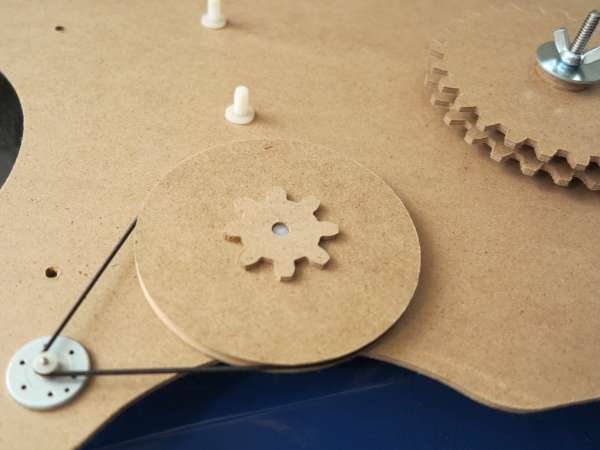
I made a v-grove pulley by cutting out two circles (with 1/4″ center hole). I mounted them on a drill chuck then turned it into a point with a sanding block. I then took them off the chuck and flipped one of them over and glued them together. Works very well!
I have a video of the gears running. They run really nice. I’ll put the video up after I get the machine running so I’ll post it all at once.
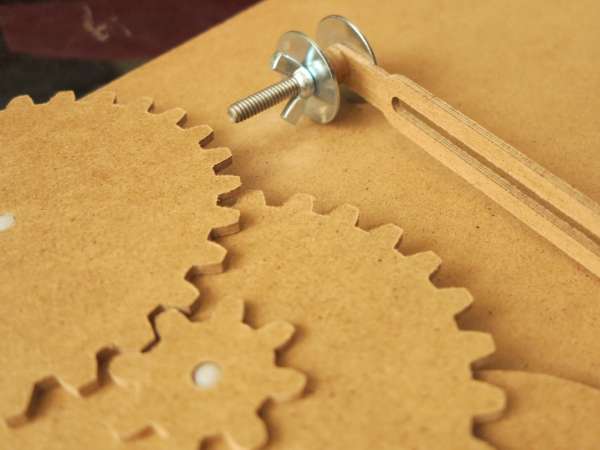
I broke 3 endmills. Partly because I was using the cheap ones and partly because of error. In one of the pictures you can see that I managed to plunge the endmill into the clamp. It managed to hit right on the bolt which is very hard steel. It glowed red hot within a fraction of a second.
I used Matthias Wendel’s gear program to cook up the gears. It’s a pretty handy program for making gears.



Still more work but the machine runs well.
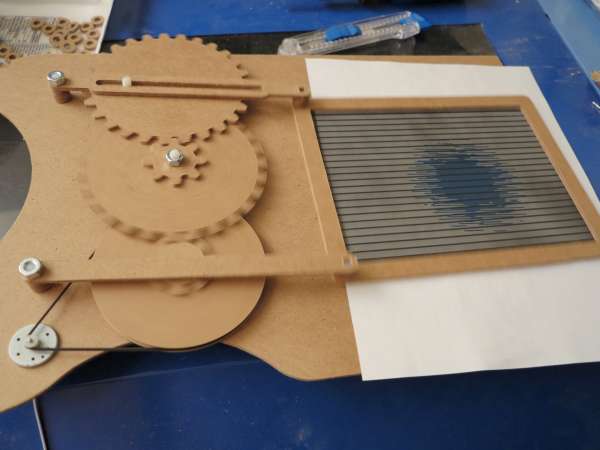
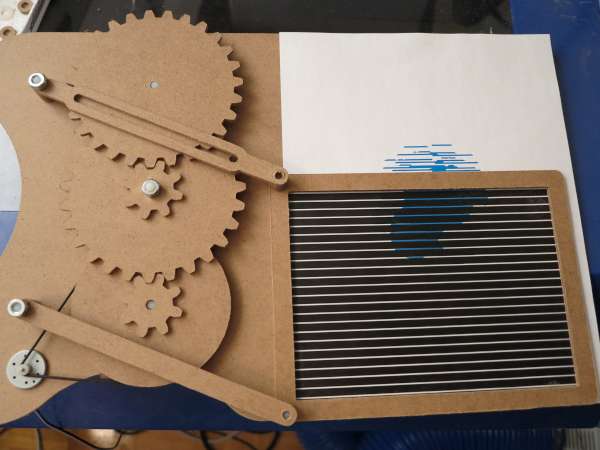
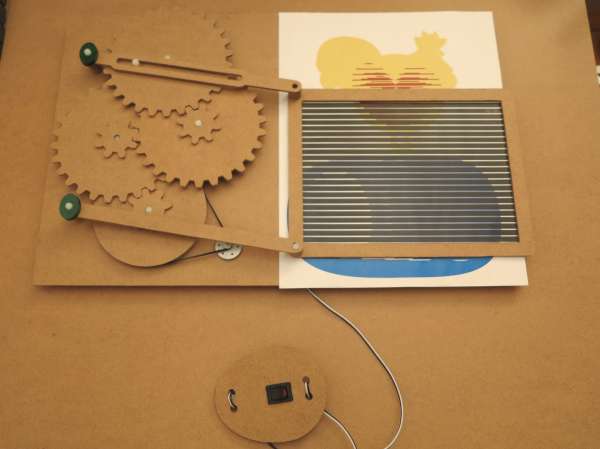
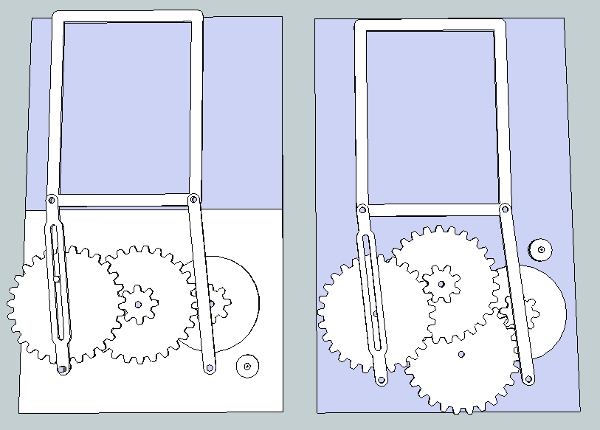 I found a 4V power supply that runs it just right I threw in a resistor so it would run a little slower and quieter. The machine is still a little fast to see the interference effect well. When I drop the voltage further it becomes a little inconsistent so I think I need to add another stage of gear reduction. I made up another gear arrangement (right). I lowered the moving frame a bit so more of the image could peak over the top of the frame. I think it’s neat to see the image directly as well as through the frame. I suspect the speed will be right after this extra gear stage is added.
I found a 4V power supply that runs it just right I threw in a resistor so it would run a little slower and quieter. The machine is still a little fast to see the interference effect well. When I drop the voltage further it becomes a little inconsistent so I think I need to add another stage of gear reduction. I made up another gear arrangement (right). I lowered the moving frame a bit so more of the image could peak over the top of the frame. I think it’s neat to see the image directly as well as through the frame. I suspect the speed will be right after this extra gear stage is added.
I will set it up so it can be hung like a picture on the wall.
So I think it’s time to make a nicer animation for it. I think it can be much larger. This is a low resolution animation system so it has to be something simple. There is probably room for more than one image.
It’s interesting to note that it turns counter-clockwise easier than clockwise. Can you figure out why? 🙂

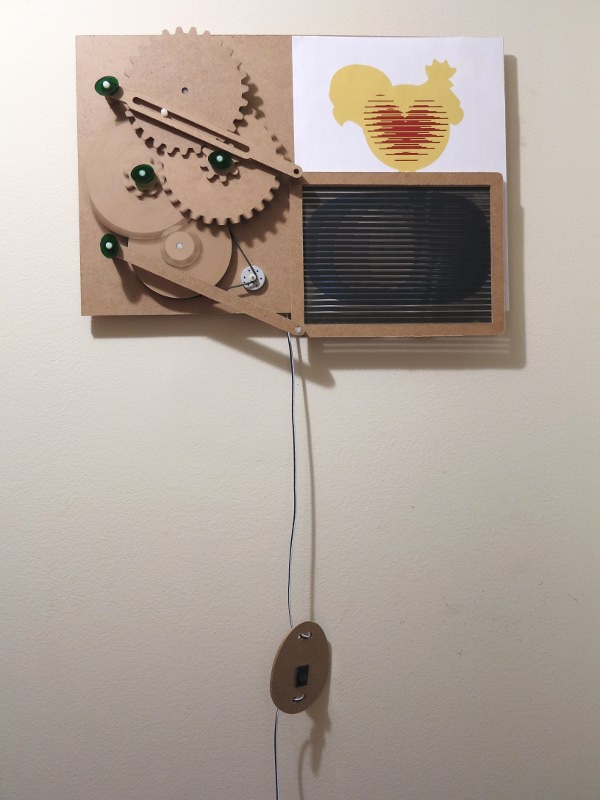
Interference Rooster Ready for Installation
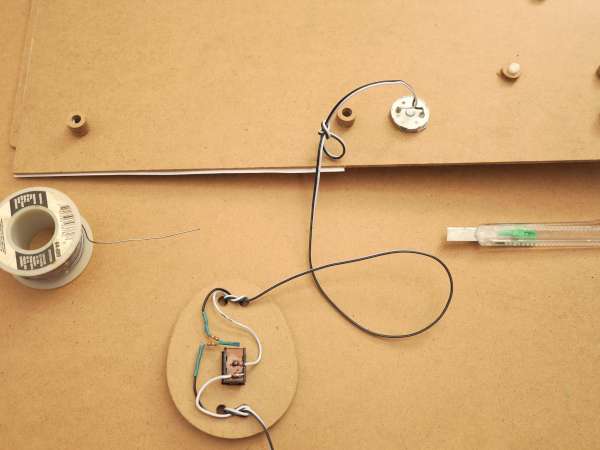
I added another stage of gearing as planned and made up a different animation. I tested the heart animation on my business card project. Everything was working well so I secured the wiring, added a hangar and standoffs. I also made a switch shaped like an egg. People will just turn it off and on. It needs to plug into 120 but I made the cord very long.
Here is one of the first runs.
Here it is during stress testing.
Here it is installed.



Related
I was thinking of calling it Roto-Rooster. What do you think?
It is in storage at Atomic and will be installed tomorrow!